

TEMPO
How can we build clocks that think: timing systems that learn, adapt, and stay stable even when GPS is gone?
TEMPO is a physics-guided research effort at the University of Washington’s ARC Lab focused on achieving resilient timekeeping for aerospace and embedded systems. It combines metrology, control theory, and machine learning to model, predict, and correct oscillator behavior under environmental stress.
01

Overview
Launched as part of UW’s broader work in resilient navigation and sensing, TEMPO focuses on achieving next generation timekeeping for aerospace and embedded systems. The project develops a unified framework for characterizing and stabilizing oscillators when exposed to temperature fluctuations, vibration fields, supply noise, and mechanical loading. These effects limit the performance of timing systems across UAVs, satellite networks, distributed RF systems, and precision instrumentation.
TEMPO introduces a continuous time, fully coupled state space representation of oscillator physics that departs from traditional first order or separable noise models. By embedding higher order environmental dependencies into an expanded lifted feature vector ϕ(t), the project captures the nonlinear and cross coupled mechanisms that govern real frequency drift. This physics informed structure provides a principled path toward predictive modeling and adaptive correction using modern system identification and control techniques.
02
Impact
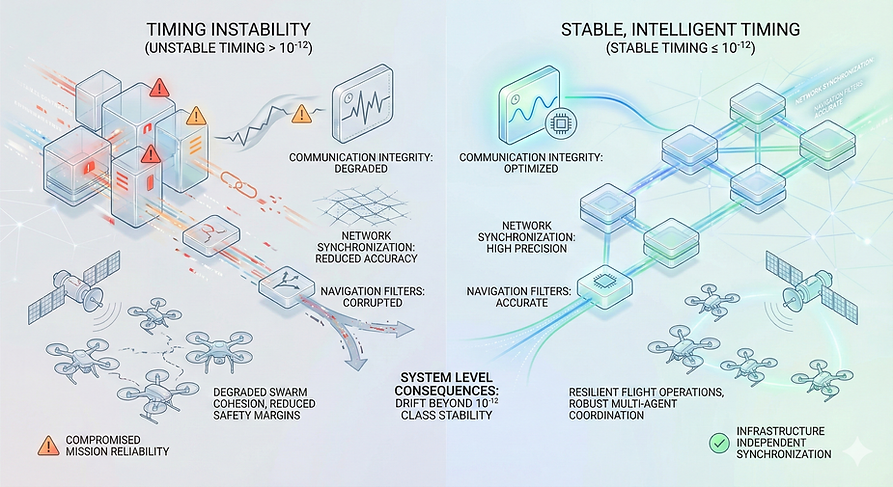
Every autonomous platform depends on reliable timing. GNSS outages occur during scintillation, interference, or contested environments, and conventional holdover methods fail to maintain long term stability. These failures propagate through communication links, network synchronization layers, and navigation filters. Achieving sub 10⁻¹² stability without a GPS reference has direct impact on the performance and safety of aerospace systems.
TEMPO is significant because it bridges oscillator physics with adaptive estimation, enabling timing sources to remain stable over long durations without external reference signals. This capability supports resilient flight operations, fault tolerant swarm coordination, and infrastructure independent timing for distributed RF systems. As aerospace platforms continue to adopt embedded autonomy, the demand for intelligent, self correcting timing solutions will only accelerate.

03
Problem
Oscillator drift is driven by nonlinear, environmentally induced coupling among temperature, vibration, voltage, and mechanical stress. Traditional models treat these influences independently and cannot explain or predict the high dimensional interactions observed in real data. The absence of a unified dynamical framework limits both the accuracy of drift prediction and the effectiveness of control strategies designed to mitigate it.
Developing this understanding requires precision metrology, validated datasets, and modeling tools that can incorporate domain physics while remaining compatible with embedded deployment.
04
Scientific Approach
TEMPO establishes a physics guided, continuous time state space model that maps oscillator dynamics into a fully coupled matrix structure A, B, C, D supported by a lifted feature vector ϕ(t). This formulation enables representation of nonlinear effects, temperature frequency coupling, vibration sensitivity, and cross terms without imposing artificial separability assumptions.
A precision measurement chain validates the model inputs using dual counter configurations and modified three cornered hat techniques, achieving Allan deviation characterization from 10⁻⁹ to 10⁻¹². These datasets support identification of latent coupling modes, estimation of lifted features, and design of adaptive controllers that anticipate and correct drift in real time.
Through this integrated modeling and experimental pipeline, TEMPO aims to deliver embedded timing systems capable of approaching Rb class stability within a TCXO scale footprint. The result is a new generation of intelligent clocks designed for UAVs, distributed RF networks, and autonomous aerospace systems that must remain stable even when GPS is unavailable.



Gallery




